Experiments
Experiments
After its creation, the agent-based simulation SimCo was and still is the underlying modelling framework for various experiments leading to various empirical outcomes. As SimCo can be adapted and enhanced accordingly to new projects and their individual needs, it is constanly evolving as well. Thus, many results were gathered over SimCo's existence and the most important findings are presented in this chapter.
Transformation of Transport towards Sustainability
Published in JASSS [1] by Weyer; Johannes, Adelt; Fabian, Hoffmann; Sebastian & Ihrig; Andreas (2018)
Experiments regarding the example of transportation included the base scenario (without any intervention) and three governance scenarios with different degrees of intervention. The latter three focus on cars with internal combustion engine and take for granted (and refrain from debating in detail) that this technology harms environment more than other technologies, e.g. by its CO2 emissions. These three governance scenarios were implemented as follows:
- Soft control: via road pricing, limited in space and time. Costs of agents using the car are stepwise raised, if traffic jams occur or pollution exceeds limits, and afterwards lowered again.
- Strong control: via spatial and temporal bans of cars, if another limit is reached. Agents are forced to change technology or take another route.
- Combination of soft and strong control.
The effects of interventions were measured by means of various indices:
| Scenario | Mean capacity utilization on edges* | Mean emission short-time* | Mean emission long-time* | Bicycle usage | Car usage | Public transport usage |
|---|---|---|---|---|---|---|
| Self-coordination (basic scenario) | 21,36% | 17,96% | 33,28% | 31,61% | 62,45% | 5,94% |
| Soft control | 15,79% | 12,76% | 24,66% | 46,05% | 37,48% | 16,47% |
| Strong control | 19,13% | 15,55% | 28,92% | 41,44% | 52,08% | 6,47% |
| Soft/strong (combined) | 16,37% | 12,88% | 24,65% | 49,94% | 38,95% | 11,10% |
As the table shows, we achieve desired effects with all three modes of governance: a decrease of car use and an increase of bicycle and public transport usage, and – triggered by these changes – also a reduction of capacity utilization and emissions. Additionally, as red number show, soft control mostly performs best (or closely second best).
Impact of Governance Scenarios
The left figure below demonstrates again the varying impact of different modes of governance on technology usage: The base scenario remains stable over 8000 ticks, as does the strong control scenario, where values adjust after a few ticks rapidly to a level that doesn’t change any more in the long run, but fluctuates in the short run. Soft control has the highest impact in terms of long-term learning. In spite of short-term fluctuations, agents change their behaviour remarkably in the long run in favour of more sustainable modes of transport. Surprisingly, the figure of the combination of soft and strong control looks so similar to soft control only, that one could recommend refraining from strong measures as a means of regime change.
The right figure, showing the population, may offer a possible explanation for the sudden switch at about 1000 ticks. At this point of time the composition of the agent-population suddenly changes. Agents insisting to use the car even in high-price situations (provoked by soft measures such as tolls) run into financial problems and die out. As a result of this stubbornness, the learning algorithm on population level (see Decision Making) triggers/pushes a slow, but gradually accelerating change in proportions of agents first and then – as a consequence – of technologies’ usage as well. Again, this mechanism can be seen most clearly in the soft control scenario.
Summarizing these results, one could argue that soft control is the most effective mode of governance, leading mostly to best results with lower efforts, compared to the combination of soft and strong control.
- Results of experiments with a road transportation scenario:

Technology usage (fraction) in course of time (8000 ticks).
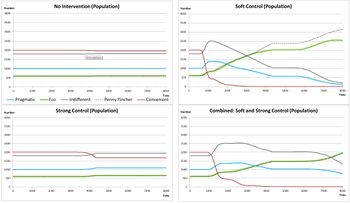
Agent population (total) in course of time (8000 ticks).


Risk Management in Road Transport
Published by TATuP [2] and Acatech [3] , Authors: Weyer; Johannes, Adelt; Fabian, Hoffmann; Sebastian & Konrad; Julius (2017/2018)
The acatech and TATuP published study aimed to provide insight on possiblities to avoid congestions and emissions in road transport through the use of static and dynamic interventions. Focussing on static interventions, a bicycle comfort increase led to the strongest effect, whereas as an imporvent of PT only had minor effects. Moreover, increasing the car costs showed comperable results to an increase in bicycle comfort (cf. table "static interventions (mean values)"). Adressing the experiments on dynamic interventions, results imply that soft control leads to marginal better values in terms of capacity utilization and short and long scope emissions for the whole network. A combination of soft and hard control adds to this and improves the experiments results further.. Maximal values for single edges suffer, in contrast to the whole network, from vast violation of predetermined edge limits. Hard control is especially succesfull mitigating these effects by reducing pollution to a noteable amount. Combined control was similar in its results to the hard control, yet not quite as efficent as hard control by its own. Soft control only led to minor improvements in comparison to the other two types of control.
| Intervention | Capacity Utilization | Emissions (short scope) | Emissions (long scope) |
|---|---|---|---|
| Base Scenario) | 21,6 | 18,0 | 33,4 |
| Comfort Bike | 17,3% | 13,2 | 24,6 |
| Comfort PT | 19,1 | 16,5 | 30,5 |
| Cost Car | 16,7 | 13,3 | 25,4 |
| Mode of Governance | Capacity Utilization | Emissions (short scope) | Emissions (long scope) |
|---|---|---|---|
| No Control (base scenario) | 25,7 | 36,1 | 71,1 |
| Soft Control | 25,7 | 34,8 | 60,4 |
| Strong Control | 22,0 | 31,8 | 63,1 |
| Combined | 22,0 | 31,5 | 58,6 |
| Mode of Governance | Capacity Utilization | Emissions (short scope) | Emissions (long scope) |
|---|---|---|---|
| No Control (base scenario) | 120,5 | 251,8 | 471,9 |
| Soft Control | 133,8 | 244,8 | 444,6 |
| Strong Control | 128,4 | 108,0 | 202,1 |
| Combined | 132,6 | 111,5 | 204,9 |
Policy Options fostering sustainable transformation
Published as working paper [4], Authors: Philipp; Marlon, Adelt; Fabian (2018)
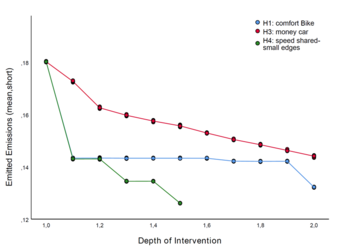
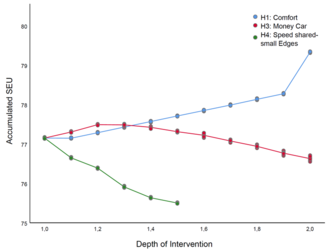
The working paper focussed on various policy options imagined by German politics and NGOs to foster a sustainable person transport. Experiments included a increase in bicycle comfort, the construction of additional bicycle ways, maximum speeds for cars, a car toll and the recently well discussed free public transport. The results showed, that a raise in bicycle comfort, an introduction of car tolls, as well as tempolimits were valid options to foster a sustainable person transport. Additional bicycle roads and free public transport had little to no effect on the overall results. Especially noteworthy is the increase of accumulated SEU by raising the car toll for up to 20%points in addition to the strong effect of marginal (10%) increased bicycle comfort.
- Comparison: Emissions and SEU


Car Sharing: innovative Transport concepts in the urban environment
Published as Bachelor Thesis, Authors: Dorsch; Tim-Patrick, Adelt; Fabian (2018)
The thesis focussed on the relatively new technology of car-sharing. The purpose of the conducted experiments was to verify, whether car-sharing can improve on person transport's mobility issues. Thus, a new technolgy "car-sharing" was developed, as well a switching mechanismen, which allows to change the transport technology mid-travel. The tested hypothesis ranged from advertising and raising the ecological continousness to the electrification of the car sharing fleet (cf. the table below). Summarizing the results car-sharing did not necessarily reduced stress on edges and the environment. In contrast, the support of environmental friendly mobility concepts lead to more promising results on macro-level scale.
| Experiment | Car Sharing Usage | Environmental Footprint | Edge Utilization | Social Footprint |
|---|---|---|---|---|
| H 1.1 Information | ++ | 0 | - | + |
| H 1.2 Environmental Protection (up to 1.5) | + | 0 | 0 | + |
| H 1.2 Evironmental Protection (from 1.5) | ++++ | +++ | + | + |
| H 2 Carsharing Cost Reduction | 0 | 0 | 0 | 0 |
| H 3 Discount PT-Car | 0 | 0 | 0 | 0 |
| H 4.1 Privat Car Cost Raise (static) | ++ | +++ | ++ | --- |
| H 4.2 Privat Car Cost Raise (dynamic) | ++ | ++ | ++ | --- |
| H 4.3 Privat Car Cost Raise (blocks) | ++ | +++ | ++ | - |
| H 5 Electrification CS-Fleet | +++ | ++ | -- | 0 |
Autonomous Cars: Improving efficency in road transport
Published as Bachelor Thesis, Authors: Fehrenbach; Markus, Adelt; Fabian (2018)
The newly created SimCo extension "autonomous vehicle" introduced, as the name suggests, autonmous vehicles to SimCo as well as a new indicator to measure SimCo results by identifying the amount of correctly navigated nodes. The purpose of these experiments was to determine whether autonmous cars are valid means to raise efficency of road transport. Possible improvements to be expected by the introduction of AVs could include road safety and lower emissions. Based on the gathered data, one can conclude that the AVs were more frequently used then the conventional cars. AVs were especially appealing to convenient agents and led to a diminishing of bicycle and public transport use. Moreover, network efficency was raised and driving time was reduced, as less agents were stuck in traffic. Examining the results on a makro level, the changes were not eco-friendly as the overall emissions rose due to more usage, even though the rellativ emissions fell.
Realtime control of complex systems
Published as Report [5], Authors: Weyer; Johannes, Konrad; Julius; Cepera, Kay; Adelt; Fabian(2018)
The purpose of the experiments conducted was to compare traditional route planning and intelligent, dynamic real-time navigation. In order to achieve this, the extension "rigor route planning" was developed. Using the rigor routing, 50% of agents were stuck in traffic, which led to lower emissions and a higher amount of cars on the road due to the inability to change the mode of transport during a traffic jam. Switching to intelligent navigation improved network efficency and flow of traffic. Edge utilization did rise, the amount of overloaded edges was lowered and overally less agents were stuck in trafic. In contrast, the ecological footprint was rising due to higher car use.
Resilience of complex systems
Published as Bachelor Thesis, Authors: Fälker; Felix, Adelt; Fabian (2018)
The purpose of the conducted experiments was to analyze the reaction and regeneration of complex systems following an incident. A new SimCo extension was developed to allow for a controlled knot failure without means of repair. The evaluation of the results showed, that the base modell of SimCo is rellatively resilient, even though the robustness is not always fullfiled (10% max failure). Further failur rate raises lead to more violations of the resilence criteria. Noteworthy to mention is that the system didn't collapse even though the SEU was lowered irreparable. Agents on the other hand were only temporarily stuck.
- Results of experiments concerning the resilience of complex systems
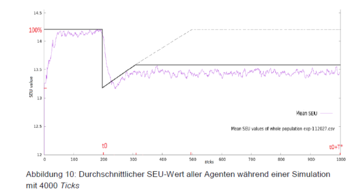
Avg. SEU of all Agents during an 4000 tick simulation.
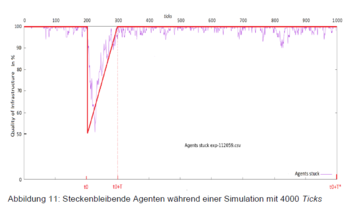
Stuck agents during an 4000 tick simulation.
.png)

Micromobility and Mobility-as-a-Service
Published as conference proceedings, Authors: Philipp; Marlon, Adelt; Fabian, Weyer; Johannes (2020) Experiment Data available File:Micro MaaS.zip
The purpose of the conducted experiments was to research on possible effects based on the introduction of innovative person transport solutions. Mikromobility and Mobility-as-a-Service both emphazise their sustainability, a claim that only the Micromobility acutually fullfils. MaaS on the on ther other hand remains unsustainable without external interventions.
| Technology Usage by Scenario | ||||||
|---|---|---|---|---|---|---|
| Transport Technology | unintegrated | Integrated | ||||
| none | micro | maas | both | maas | both | |
| PT | 7,8 | 7,1 | 2,4 | 2,3 | 7,4 | 6,8 |
| Carsharing | 1,1 | 0,8 | 1,2 | 1 | 10,9 | 10,6 |
| Car | 60 | 55,7 | 56,3 | 53 | 56,3 | 53 |
| MaaS | - | - | 20,5 | 19,8 | - | - |
| Micro | - | 7,9 | - | 5,3 | - | 5,3 |
| Bicycle | 31,1 | 28,5 | 19,6 | 18,7 | 25,3 | 24,3 |
Tab. 1: modal split by technology in (un)integrated view, values rounded and in percent (Experiment 1)
Einzelnachweise
- ↑ Fabian Adelt, Johannes Weyer, Sebastian Hoffmann, Andreas Ihrig, 2018: Simulation of the governance of complex systems (SimCo). Basic concepts and and experiments on urban transportation, in: Journal of Artificial Societies and Social Simulation 21 (2), http://jasss.soc.surrey.ac.uk/21/2/2.html.
- ↑ Adelt, Fabian/Sebastian Hoffmann, 2017: Der Simulator „SimCo“ als Tool der TA. In: TATuP Zeitschrift für Technikfolgenabschätzung in Theorie und Praxis 26 (3): 37-43, https://doi.org/10.14512/tatup.26.3.37.
- ↑ Weyer, Johannes/Fabian Adelt/Julius Konrad/Sebastian Hoffmann, 2018: Agentenbasierte Simulation sozio-technischer Systeme mit dem Simulator SimCo. In: Jürgen Beyerer/Petra Winzer (Hg.), Beiträge zu einer Systemtheorie Sicherheit (Reihe "acatech Diskussion“). München: Herbert Utz Verlag, 168-176. www.acatech.de/Publikation/beitraege-zu-einer-systemtheorie-sicherheit/
- ↑ Philipp, Marlon/Fabian Adelt, 2018: Optionen der politischen Regulierung des Personenverkehrs (Soziologische Arbeitspapiere 52/2018). Dortmund: TU Dortmund, http://hdl.handle.net/2003/36806.
- ↑ Weyer, Johannes/Julius Konrad/Kay Cepera/Fabian Adelt, 2019: Echtzeitsteuerung komplexer Systeme. Eine Simulationsstudie.